Робот на базе Arduino и Ardumoto, который едет по нарисованной линии
В данном проекте робот будет ехать по нарисованной линии благодаря фоторезистору и следующим компонентам:
1. Arduino-это очевидно!
2. Модуль двигателей Ardumoto – вы можете его приобрести на сайте buildcircuit.org.
3. Шасси робота — вы можете его приобрести на сайте sparkfun.com или по ссылке:70108 Tracked Vehicle Chassis
4. Четыре резистора для ограничения тока, номиналом 220 Ом.
5. Три резистора номиналом 1 кОм.
6. Четыре белых ультра ярких светодиода.
7. Три фоторезистора.
8. Два DC двигателя — если вы закажите на сайте sparkfun волшебное шасси, то получите сразу 2 DC двигателя с шасси робота.
9. Комплект батареек — напряжением 6В.
10. Провода/коннекторы.
Логика работы робота
Существует два способа создания робота, который едет по линии. Первый, использовать фоторезистор (LDR) и второй, использовать инфракрасные светодиоды. Черный объект отражает меньше света, чем светлый объект (черный объект поглощает больше света, чем светлый объект). Это свойство и будет использовать наш робот. Поэтому робот должен распознавать черную линию на белой поверхности.
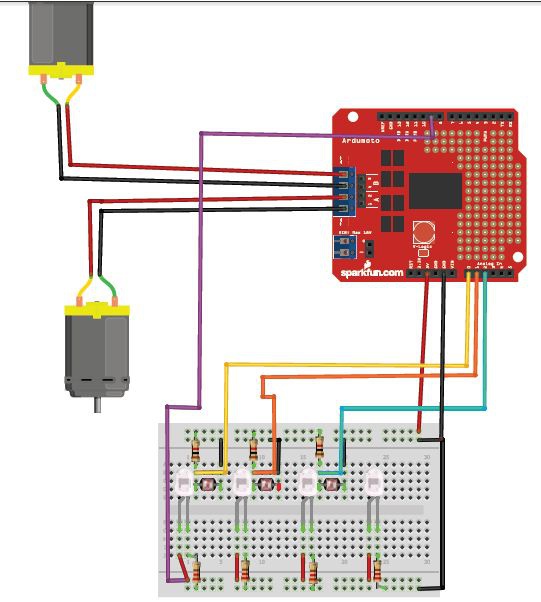
Схема нашего робота показана ниже:
Если вы в своих проектах прежде не использовали модуль двигателей Ardumoto или фоторезистор, тогда обратитесь к сноскам ниже:
a. Проекты с использованием фоторезистора.
b. Модуль двигателей Ardumoto
Тестирование вашего сенсора:
Перед установкой сенсора на шасси вашего робота проверьте, что сенсор точно определяет черную линию на белой поверхности. Данной проверке посвящен целый пост, перейдите по СНОСКЕ.
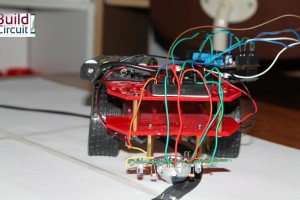
Сборка
Самой трудной частью проекта является подбор пар фоторезисторов и светодиодов. Даже небольшая ошибка приведет к тому, что робот будет съезжать с черной линии. Поэтому отнеситесь к данному вопросу очень внимательно.
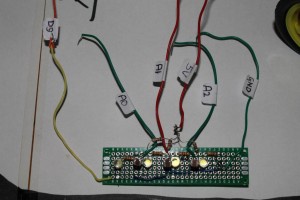
— Припаяйте светодиоды, как показано на фото ниже.
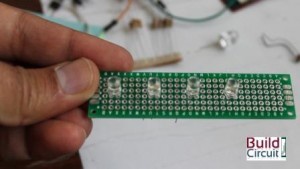
Как вы можете заметить, светодиоды устанавливаются на расстоянии 4 отверстий для пайки в печатной плате. Далее необходимо припаять фоторезисторы со стороны каждого светодиода, за исключением одного, который расположен ближе всего к большому пальцу (смотрите фото).
Необходимо выполнить следующие подключения: LED1(самый близкий к большому пальцу) — через 2 отверстия — LDR1-LED2- через 2 отверстия — LDR2- LED3 — через 2 отверстия — LDR3- LED4

Второй важный момент, который нужно помнить, — это что фоторезисторы (LDR) должны располагаться немного выше, чем светодиоды (LED), так они будут принимать отраженный свет более корректно.
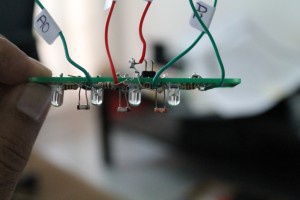
На фото показано правильное размещение светодиодов.
Теперь подключите сенсор к выводам Aduino, выполните, как показано на фото ниже:
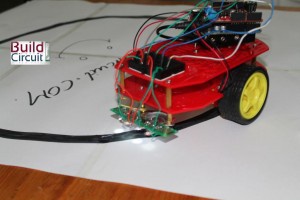
Ваш сенсор должен располагаться на расстоянии 5-7 мм выше черной линии.
Повороты должны выполняться равномерно, без рывков, поскольку фоторезисторы не реагируют на быстрое переключение. Я нарисовал круглую дорожку, по которой будет ехать наш робот. Черная линия нарисована маркером, вы также можете использовать изоляционную ленту.
ЗАГРУЗИТЕ ИСХОДНЫЙ КОД
По материалам сайта
8 комментариев